





By Rory A. Cooper et al
The Quality of Life Technology Center (QoLT) was started as a result of funding from the National Science Foundation as an Engineering Research Center, for which it receives support. Within the QoLT Center there are four research thrusts, and four system integration testbeds. The research thrusts include human systems interface, perception and awareness, mobility and manipulation, and person and society. The person and society thrust ties the research of the technical thrusts together, and ensures that the QoLT Center is well grounded in the needs of consumers, caregivers, and clinicians. The four system integration testbeds are safe driving, virtual coaches, home and community health technologies, and quality of life technology robots.
The system integration testbeds serve as a critical path in the research pipeline of the thrusts, and provide the important role of integrating research through realistic systems. Of course, the systems and thrusts are essentially in a continuous feedback-feed forward loop. The focus of this paper is the two QoLT center quality of life technology robots (QoLTBots): the Personal Mobility and Manipulation Appliance (PerMMA) and the Home Environment Robotic Butler (HERB).

Figure 1: Home Environment Robotic Butler (HERB) is designed to provide assistance to older adults and people with disabilities in their homes.
PerMMA is a collaborative project with the Department of Veterans Affairs, and the HERB is similarly a collaborative project with Intel Research in Pittsburgh. PerMMA was developed starting in 2006, and has served as a platform for research and development in bi-manual manipulation on a robotic wheelchair base to provide functional assistance and expanded mobility to people with disabilities and older adults. This groundbreaking robotics system has the potential to spawn a number of research projects and industrial applications, gaining visibility both in the research community and the media at large. Robotic systems have emerged as a rehabilitation engineering solution to ameliorate disabling conditions. A survey by Prior showed that 84% of power wheelchair users would purchase a robotic arm if it were available.
An emerging area of technology to help people with disabilities (PwD) is to seamlessly combine mobility and manipulation. Some PwD cannot retrieve a remote control, book/magazine, or a drink if not placed in their immediate proximity. Frequently, PwD will have a family member or assistant pre-prepare their meals and place them in their refrigerator; thus requiring only reheating or simply removing and eating. Therefore, work is being done to develop symbiotic systems to retrieve real-life objects through user, remote, and autonomous methods in a time-efficient, safe, acceptable, and reliable manner.
A core aspect of symbiotic systems is the melding of robotics and its traditional approach to develop autonomous systems with assistive technology which are user operated systems to produce what can be called quality of life technology (QoLT) systems that create a symbiosis of human and technology maximizing the use of the abilities of the person and the capabilities of technology in natural environments. The capabilities to remove a sealed plastic container from a refrigerator, place it in a microwave oven, heat it, open it, and place it where the user can eat it are tasks that may be well suited for QoLT systems, and of great potential value to PwD. One novel approach is to use a remote caregiver to provide assistance by remotely operating a robotic device to perform difficult tasks. This could result in robotic mobility and manipulation devices being deployed for use by PwD faster. PerMMA is one research project that aims to provide these capabilities and more, both within the home and within the community at large. PerMMA is not a wheelchair with “added intelligence” and arms; it is an integrated mobile robotic manipulator with full seating and electric powered wheelchair functions for the person.
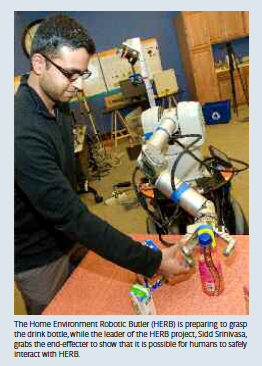
HERB is intended to be an autonomous robotic assistant within the home environment. The goal of HERB is to be able to provide meaningful assistance with home chores, such as meal preparation, unpacking and storing food supplies, cleaning dishes, light cleaning and organizing clutter. HERB may perform these tasks in cooperation with a person in the home. For example, HERB may move or lift a piece of furniture while the person cleans underneath the furniture. Long-term HERB work will focus on providing physical assistance to the user through physical contact to perform such tasks as transfers, or assisting someone after a fall. HERB moves autonomously within the home and must safely interact with and negotiate around people. However, it may also work more directly with a person as well. One of the areas being investigated is closed-kinematic chain activities where, for example, HERB may lift and carry one side of a table while a human lifts and carries the other side, requiring HERB to work collaboratively with the person. Home environments present some interesting challenges for robotic assistants. A home is partially structured as people tend to have routines, and there are a number of fixed built environment features; however, there is also a significant degree of randomness. A lot of the randomness includes clutter; imagine taking items out of a grocery bag and putting them away. Even removing the correct object desired by the human user from a refrigerator is a substantial technical problem. Thus far we have made some important breakthroughs in motion planning, recognizing objects and their orientation, identifying objects within a cluttered environment, grasp planning for natural objects, and pose control such as keeping a pitcher of water upright as it is moved. There is much work that remains such as human-robot interaction, completing realistic activities rather than discrete tasks. We are working towards realistic tasks such as actually preparing chocolate chip cookies.
While both of our QoLTBots have made tremendous progress, and are breaking new ground in the area of robots working symbiotically with a human end-user; there are extraordinary hurdles to overcome. Working in human environments (e.g., home, school, work, communities) and in close proximity and in some cases actual contact with humans is a daunting task that requires a large and diverse group of talented and dedicated people. However, the pay-off in terms of making a positive difference in people’s lives can be huge.
Rory A. Cooper, Ph.D. University of Pittsburgh
Siddhartha Srinivasa, Ph.D. Department of Veterans Affairs
Chris Atkeson, Ph.D. Robotics Research Intel Pittsburgh
Jijie Xu, Ph.D. Carnegie Mellon University U.S.A. RCOOPER@pitt.edu
 About Brenda Wiederhold
About Brenda Wiederhold
President of Virtual Reality Medical Institute (VRMI) in Brussels, Belgium.
Executive VP Virtual Reality Medical Center (VRMC), based in San Diego and Los Angeles, California.
CEO of Interactive Media Institute a 501c3 non-profit
Clinical Instructor in Department of Psychiatry at UCSD
Founder of CyberPsychology, CyberTherapy, & Social Networking Conference
Visiting Professor at Catholic University Milan.